
Önvezető járműveket fejlesztenek a BME-n
A jövő egyik legfontosabb közlekedési trendje egyértelműen az autonóm irányítás. Az önök konzorciuma hogyan kapcsolódik a minél hatékonyabb önvezető megoldások fejlesztésébe?
– Alapvető célkitűzésünk volt, hogy a pályázatot benyújtó konzorciumi partnerek tematikus kutatási területekkel pályázzanak. Az alapvető téma az autonóm járművek kutatása, emellett azonban hangsúlyos még az elektromobilitással kapcsolatos fejlesztés is. Fontosnak tartottuk már a kezdet kezdetén, hogy a konzorciumi tagok jól meghatározott és összehangolt kutatási program szerint haladjanak mind a konzorcium egészét tekintve, mind az intézményeken belül. A konzorciumi partnerek aszerint válogattak az előzetesen kitűzött feladatok között, hogy melyik illeszkedik leginkább a portfóliójukba. A Pannon Egyetem mind az autonóm, mind az elektromobilitási témában a laboratóriumi, illetve hardver in-the-loop tesztekkel és szimulációkkal foglalkozik. A győri Széchenyi István Egyetem főként az elektromobilitás témakörbe kapcsolódik be, míg a BME az autonóm járművekre koncentrál, minimális elektromosmeghajtás-kutatással.
 Elektromobilitás laboratórium a Széchenyi István Egyetemen
Elektromobilitás laboratórium a Széchenyi István EgyetemenÖnök a Budapesti Műszaki és Gazdaságtudományi Egyetemen milyen kutatóprogramokat indítottak?
– Tanszékünk szorosan együttműködik a zalaegerszegi tesztpályával, van is ott egy kihelyezett irodánk, és az ottani kollégákkal rendszeresen konzultálva, együttműködve végezzük a kutatásokat. Az autonóm járműrendszerek olyan összetettek, hogy rengeteg tudományterületet fednek le. Nemcsak a járműtechnikai, de az építőmérnöki, a villamosmérnöki karhoz kapcsolódó, illetve az informatikai, közlekedésmérnöki tudományok közreműködése is elengedhetetlen. Ennek megfelelően e karokat és tanszékeket is bevonjuk a projektbe, mindenki hozza a saját tudását. Látható, hogy már a BME-n, „házon belül” végzett kutatómunka is olyan komplex, hogy az csak szoros összehangoltsággal képes jól működni. Az együttműködésre kiváló alkalmat biztosít az, hogy kutatásaink nem csupán elméleti jellegűek, hanem egy tényleges, autonóm irányítású járművet is építünk a kutatási eredmények tesztelésének céljából.
 A zalaegerszegi autonóm jármű tesztpálya látványterve
A zalaegerszegi autonóm jármű tesztpálya látványterveItt egy személygépkocsira kell gondolni?
– Igen, egy Smart Fortwo autót alakítottunk át teljesen autonóm működésre. Az alapkutatási területen végzett számos vizsgálat egyike a különböző autonóm járműirányítási rétegek elemzése és fejlesztése. Irányítási rétegeken a környezet értékelését, a különféle szenzorok jelfeldolgozását, a döntési mechanizmusokat és az autó ezek eredményeképpen létrejövő viselkedését értjük. Ehhez kapcsolódik az autó hosszirányú és keresztirányú irányítása (a sebesség befolyásolása, illetve a kormányzás). De lemegyünk a legalacsonyabb szintekre, az autó viselkedését megvalósító aktuátorok működését is vizsgáljuk a fékektől a váltóig és a kormányvezérlésig. Ezeken kívül rendkívül fontos tématerület a kommunikáció, ahol a legerősebben a kiberbiztonságra fókuszálunk.
 A BME által fejlesztett autonóm jármű
A BME által fejlesztett autonóm járműHogyan kapcsolódik a kiberbiztonság a járműtechnikához?
– Ez a terület kiemelkedően fontos. Az autonóm járművekben működő, illetve a tőlük távol lévő, és velük vezeték nélküli kapcsolaton keresztül kommunikáló számítógép adja a parancsokat a járműnek. E rendszert a rosszindulatú hekkerek fel is törhetik, és így adott esetben átvehetik az irányítást az autó felett. Nem csoda, hogy a legnagyobb autóipari cégek sorban vásárolják fel a kiberbiztonsági vállalatokat, amelyek segíthetnek biztonságosabbá tenni a rendszereiket. Míg korábban az autóipar főként az akaratlan veszélyhelyzetek ellen védő biztonsági (safety) megoldásokra koncentrált, addig ma már ugyanilyen fontosak a szándékos károkozás ellen védelmet nyújtó biztonsági (security) fejlesztések. Az akaratlagos károsítók elleni védelem teljesen más megközelítést igényel.
Milyen eredményeket értek el eddig a kutatásaik során?
– A projekt gyakorlatilag minden tématerületén jelentős eredményeket értünk már el, számos kutatót és hallgatót bevonva a projektbe. Az alapkutatási eredményeinket rendszeresen publikáljuk folyóiratokban és konferenciákon, de egy ilyen komplex kutatási program esetében elengedhetetlen a ténylegesen létrejövő autonóm jármű. Egy működő autó szükséges ahhoz, hogy demonstrálni tudjuk az általunk fejlesztett autonóm járműirányítási rendszerek működőképességét. Folyamatosan építjük be az autóba az újabb és újabb funkciókat, tehát a jármű állandóan fejlődik. A már beépített képességek egyike a valet parking funkció. Ezt úgy képzelhetjük el, hogy a mobiltelefonunkkal magunkhoz hívhatjuk az autót a parkolóházban. Így nem kell emlékeznünk arra, hogy pontosan hol is parkoltunk. Ezt a működést már többször bemutattuk az élő demonstrációk alkalmával is.
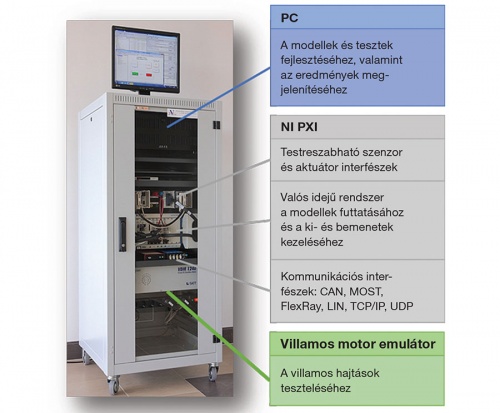 ADAS rendszerek tesztelésére alkalmas HIL/SIL szimulációs környezet a Pannon Egyetemen
ADAS rendszerek tesztelésére alkalmas HIL/SIL szimulációs környezet a Pannon EgyetemenA közúti forgalomban hogyan segíthetik a járművezetőket az önök által fejlesztett megoldások?
– Egy másik, már most is működő autonóm funkció a forgalmidugó-asszisztens, amely két alapvető szolgáltatást nyújt. Az egyik a sávtartás: az autó automatikusan figyeli az úttest sávelválasztó felfestéseit, és ennek megfelelően kormányozza a gépkocsit.
A másik a hosszirányú vezérlés, amelyet leegyszerűsíthetünk gyorsításra, illetve fékezésre is. Az autó az előtte lévő kocsi távolságához és sebességéhez adaptálja a sebességét. Ugyanez a funkció képes arra, hogy működés közben automatikusan sávot váltson, ha a sofőr lenyomja az indexet. Ehhez először a környezetérzékelő szenzorjai segítségével megvizsgálja, hogy nem jön-e egy gyors jármű hátulról a szomszéd sávban. Többféle környezeti szenzort, így kamerákat, radart és lézerszkennert is alkalmazunk az autón.
A jövőben tovább bővítjük az érzékelők tárházát, és növeljük majd a felbontásukat is. A közeljövőben arra számíthatunk, hogy először az autópályákon fognak elterjedni az autonóm vezetési megoldások, hiszen e környezet a legegyszerűbben értelmezhető a számítógépek számára. A konzorciumi fejlesztéseinkkel – kihasználva a zalaegerszegi autótesztpálya különleges adottságait – minden esély megvan arra, hogy a magyar fejlesztések a nemzetközi kutatások élvonalába emelik a magyar szakemberek eredményeit.•